.jpg)


歩行は、ロコモーターユニットの働きがとても重要です。ロコモーターユニットは、身体を目的地へ運ぶとき、次の4つの機能を遂行しています。
①直立姿勢の安定
②推進力の生成
③衝撃の吸収
④エネルギーの温存
直立姿勢の安定【歩行の基本②】
①直立姿勢の安定
みなさんご存知のように、人間の身体は多くの骨が連結されて形作られています。その骨の連結部は必ずしも平らではなく、多くは丸みを帯びています。この連結部は関節と呼ばれています。
人間が直立するということは、骨を積み重ねていくということです。骨の連結部は丸まっているので、ただ積み重ねただけでは簡単に倒れてしまいます。それを防ぐためには、上に載った骨が倒れない程度に関節を固定しておかなければなりません。この固定する役目を主に担っているのが、筋肉と靱帯です。そして、体の中で人間が意識的にコントロールできるものは、筋肉だけです。つまり、人間は多くの筋肉の力加減を適切にコントロールさせることによって、直立姿勢を保つことができているのです。
連結部が丸まっている骨を、倒れないように積み重ねて直立にさせるだけでも大変なことですが、歩行時は姿勢が常に変化しているので、さらに大変なこととなります。特に脚の骨は細長く縦に積み重なっていて倒れやすため、筋肉の絶妙なコントロールが必要となります。
つまり、ロコモーターユニットは、この高度なコントロールを歩行時に常に行っているのです。正しい歩き方を知るには、このロコモーターユニットの機能を知る必要があります。(^^)/
、推進力の生成について説明していきます。(^^)/
推進力の生成①【歩行の基本③】
みなさんご存知のように、物体を運ぶには力が必要です。私たちが歩くためには、身体を運ぶ力が必要です。その力は何によってもたらされているのでしょうか??多くの方はこう思っているのではないでしょうか?「足で床を蹴る力で歩いている」と。しかし、実際はその力だけではありません。むしろ、これから説明することの方が、歩くときに必要な力として重要なことです。特に私たちが、より自然に、より楽に歩いているときは、ほとんど後者の力で歩いています。その力とは、“重力”です。もっと正確に言えば、重力によって身体が前方に落下する力です。つまり、私たちは歩くとき、わざと片脚立ちになってバランスを崩し、身体が前方へ倒れていく力を利用しているのです。この力を、私たちの脚に備わっている巧妙な仕掛けによって、推進力に変えて、歩いているのですまた、歩いているときに振り出される脚の、前方へ進もうとする力も、推進力の生成に貢献しています。それでは、これらのメカニズムを説明していきます
◎最初の1歩
まず、立っている状態から歩くには、最初の1歩を開始しなければいけません。これまでの研究で、歩き始めるときは、まず振り出す側の脚(遊脚側下肢)で床を押していることが明らかにされています。これは、身体の重心(重さの中心)を、片脚立ちになる側の脚(立脚側下肢)へ移動させるためと考えられています。
ちなみに、身体の重心は骨盤の中にあります(正確には、第2仙椎のやや前方)。立脚側下肢に重心が移動している中、遊脚側下肢は足を持ち上げ、床から離れます。立脚側下肢は、脚の筋力を調整して重心を身体の前方へ移動させ、身体を前方へ倒れさせようとします。そして、前方へ倒れる身体を支えようと、遊脚側下肢を前方へ振り出します。その足を床について、倒れる身体を支えます。これで最初の1歩が完成となります。その後2歩目へと進むのですが、遊脚側下肢を床についたとき、重力を利用して作った、身体が前方へ落下する力が損なわれないように、人間の脚に備わっている巧妙な仕掛けが作用します。その仕掛けは、ロッカー機構と呼ばれるものです。正しい歩き方を知るには、必ず理解していなければならない仕掛けです。
その仕掛けとは、脚を1本の棒とみなして、その棒を回転させることで推進力を損なわないようにするものです(図1)。これはロッカー機構と呼ばれています。まず、1歩目で脚が斜め前方に、床に向かって落下していきます(図1-a)。脚が床に着くと、着いたところを支点として脚が前方へ回転します(図1-b)。ここで、床へ落下する力が、前方へ回転する力へ変換されます。
脚が前方へ回転することにより、脚の上に載っている身体が前方へ前進することとなります(図1-c)。このように私たちは、身体が落下する力を回転する力に変換しながら歩いているのです。この変換にはいくつかの段階があります。それは、このロッカー機構が行われる部分が、次々移動していくからです。
それらは順番に、
1.ヒールロッカー
2.アンクルロッカー
3.フォアフットロッカー
4.トウロッカー
と呼ばれています。
みなさんご存知のように、人間の身体は多くの骨が連結されて形作られています。その骨の連結部は必ずしも平らではなく、多くは丸みを帯びています。この連結部は関節と呼ばれています。
人間が直立するということは、骨を積み重ねていくということです。骨の連結部は丸まっているので、ただ積み重ねただけでは簡単に倒れてしまいます。それを防ぐためには、上に載った骨が倒れない程度に関節を固定しておかなければなりません。この固定する役目を主に担っているのが、筋肉と靱帯です。そして、体の中で人間が意識的にコントロールできるものは、筋肉だけです。つまり、人間は多くの筋肉の力加減を適切にコントロールさせることによって、直立姿勢を保つことができているのです。
連結部が丸まっている骨を、倒れないように積み重ねて直立にさせるだけでも大変なことですが、歩行時は姿勢が常に変化しているので、さらに大変なこととなります。特に脚の骨は細長く縦に積み重なっていて倒れやすため、筋肉の絶妙なコントロールが必要となります。
つまり、ロコモーターユニットは、この高度なコントロールを歩行時に常に行っているのです。正しい歩き方を知るには、このロコモーターユニットの機能を知る必要があります。(^^)/
、推進力の生成について説明していきます。(^^)/
推進力の生成①【歩行の基本③】
みなさんご存知のように、物体を運ぶには力が必要です。私たちが歩くためには、身体を運ぶ力が必要です。その力は何によってもたらされているのでしょうか??多くの方はこう思っているのではないでしょうか?「足で床を蹴る力で歩いている」と。しかし、実際はその力だけではありません。むしろ、これから説明することの方が、歩くときに必要な力として重要なことです。特に私たちが、より自然に、より楽に歩いているときは、ほとんど後者の力で歩いています。その力とは、“重力”です。もっと正確に言えば、重力によって身体が前方に落下する力です。つまり、私たちは歩くとき、わざと片脚立ちになってバランスを崩し、身体が前方へ倒れていく力を利用しているのです。この力を、私たちの脚に備わっている巧妙な仕掛けによって、推進力に変えて、歩いているのですまた、歩いているときに振り出される脚の、前方へ進もうとする力も、推進力の生成に貢献しています。それでは、これらのメカニズムを説明していきます
◎最初の1歩
まず、立っている状態から歩くには、最初の1歩を開始しなければいけません。これまでの研究で、歩き始めるときは、まず振り出す側の脚(遊脚側下肢)で床を押していることが明らかにされています。これは、身体の重心(重さの中心)を、片脚立ちになる側の脚(立脚側下肢)へ移動させるためと考えられています。
ちなみに、身体の重心は骨盤の中にあります(正確には、第2仙椎のやや前方)。立脚側下肢に重心が移動している中、遊脚側下肢は足を持ち上げ、床から離れます。立脚側下肢は、脚の筋力を調整して重心を身体の前方へ移動させ、身体を前方へ倒れさせようとします。そして、前方へ倒れる身体を支えようと、遊脚側下肢を前方へ振り出します。その足を床について、倒れる身体を支えます。これで最初の1歩が完成となります。その後2歩目へと進むのですが、遊脚側下肢を床についたとき、重力を利用して作った、身体が前方へ落下する力が損なわれないように、人間の脚に備わっている巧妙な仕掛けが作用します。その仕掛けは、ロッカー機構と呼ばれるものです。正しい歩き方を知るには、必ず理解していなければならない仕掛けです。
推進力の生成②【歩行の基本④】
前回紹介したように、歩行において、1歩目を完了して2歩目へ移るとき、1歩目で作った身体を前進させる力、すなわち身体が落下する力をできるだけ損なわないよう、私たちの脚には巧妙な仕掛けが備わっています。
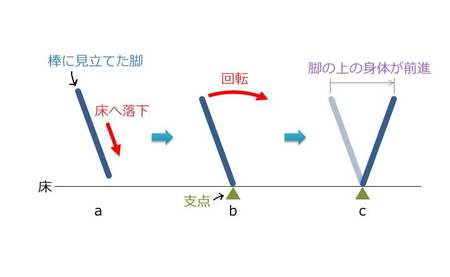
図1:ロッカー(揺りてこ)機構
その仕掛けとは、脚を1本の棒とみなして、その棒を回転させることで推進力を損なわないようにするものです(図1)。これはロッカー機構と呼ばれています。まず、1歩目で脚が斜め前方に、床に向かって落下していきます(図1-a)。脚が床に着くと、着いたところを支点として脚が前方へ回転します(図1-b)。ここで、床へ落下する力が、前方へ回転する力へ変換されます。
脚が前方へ回転することにより、脚の上に載っている身体が前方へ前進することとなります(図1-c)。このように私たちは、身体が落下する力を回転する力に変換しながら歩いているのです。この変換にはいくつかの段階があります。それは、このロッカー機構が行われる部分が、次々移動していくからです。
それらは順番に、
1.ヒールロッカー
2.アンクルロッカー
3.フォアフットロッカー
4.トウロッカー
と呼ばれています。
推進力の生成③【歩行の基本⑤】
今回からは、前回紹介した4つのロッカー機構を説明していきます。
1.ヒールロッカー
通常、歩いているとき、私たちは踵から床に着けます。そのとき、踵を支点として、脚が前方へ回転します。これをヒールロッカー(踵ロッカー)といいます(図1)。このとき、膝は少し曲がります。
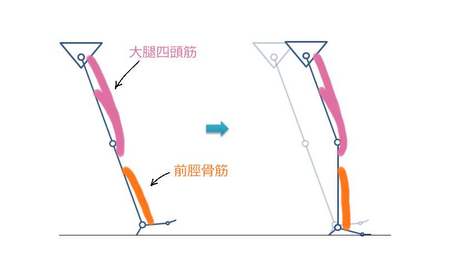
図2:前脛骨筋と大腿四頭筋
これは、前脛骨筋と大腿四頭筋という筋肉が働くことによって可能となります(図2)。前脛骨筋は、脛骨(すねの骨)と足の甲を結ぶ筋肉です。大腿四頭筋は、大腿骨(太ももの骨)や骨盤と脛骨を結ぶ筋肉です。
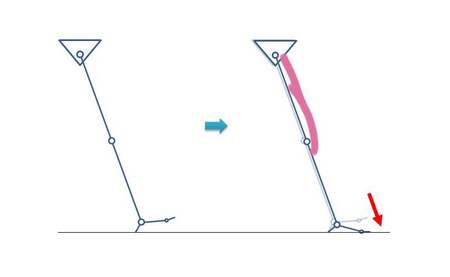
図3:フットスラップ
前脛骨筋が働かないと、フットスラップと呼ばれる異常現象が生じます(図3)。これは、踵が床に着いた直後、そのまま足の裏が床に落ちていく現象です。このとき「パタン」という足の裏で床を打つ音が聞こえます。つまり、前脛骨筋は、脛骨に足の甲をしっかり引き付けておく役割を担っているのです。
このフットスラップが生じると、ヒールロッカー機構が消失してしまい、歩行時の推進力である身体が落下する力を利用しきれなくなってしまいます。効率の悪い、身体へのダメージの大きい歩き方となってしまいます。
.jpg)
図4:膝折れ(膝くずれ)
大腿四頭筋が働かないと、膝折れ(膝くずれ)と呼ばれる異常現象が生じます(図4)。これは、踵が床に着いた直後、膝が急激に曲がって、身体が床へ落下していく現象です。つまり、大腿四頭筋は、膝が曲がっていかないように、脛骨に大腿骨をしっかり結び付けておく役割を担っています。
この膝折れが生じると、膝から上の身体を前進させることができなくなり、歩行不能となってしまいます。
ちなみに、大腿四頭筋が働かなくても、他の筋肉(大殿筋、大内転筋、ヒラメ筋など)の力を利用して無理やり膝を伸ばしながら歩ける場合があります。しかし、この歩き方を続けていると、膝が反対の方へ曲がっていくようになります。この膝は、反張膝と呼ばれています。この歩き方は、身体にとってダメージの大きな歩き方です。
アンクルロッカーについて説明していきます。(^^)/
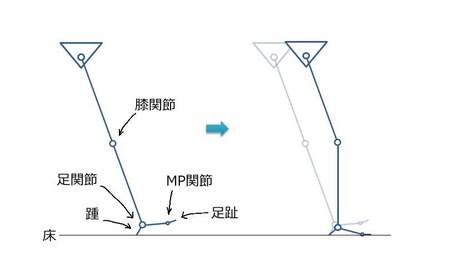
1.ヒールロッカー
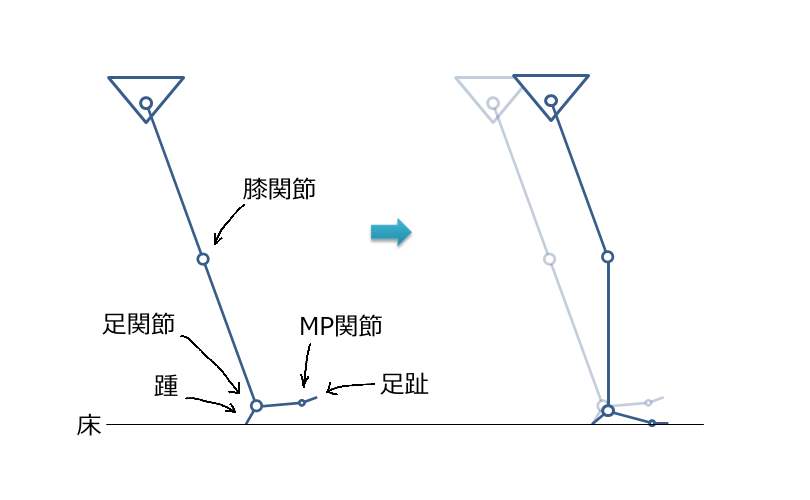
※足趾:足の指 MP関節:足の指の付け根の関節
図1:ヒールロッカー
通常、歩いているとき、私たちは踵から床に着けます。そのとき、踵を支点として、脚が前方へ回転します。これをヒールロッカー(踵ロッカー)といいます(図1)。このとき、膝は少し曲がります。
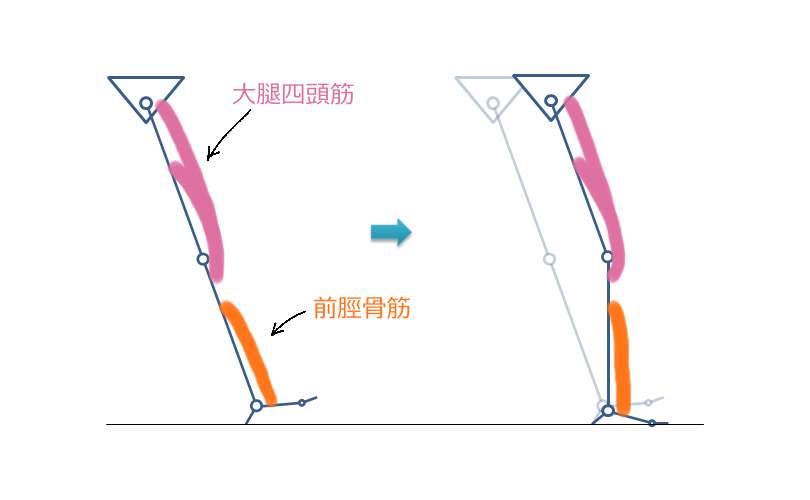
図2:前脛骨筋と大腿四頭筋
これは、前脛骨筋と大腿四頭筋という筋肉が働くことによって可能となります(図2)。前脛骨筋は、脛骨(すねの骨)と足の甲を結ぶ筋肉です。大腿四頭筋は、大腿骨(太ももの骨)や骨盤と脛骨を結ぶ筋肉です。
図3:フットスラップ
前脛骨筋が働かないと、フットスラップと呼ばれる異常現象が生じます(図3)。これは、踵が床に着いた直後、そのまま足の裏が床に落ちていく現象です。このとき「パタン」という足の裏で床を打つ音が聞こえます。つまり、前脛骨筋は、脛骨に足の甲をしっかり引き付けておく役割を担っているのです。
このフットスラップが生じると、ヒールロッカー機構が消失してしまい、歩行時の推進力である身体が落下する力を利用しきれなくなってしまいます。効率の悪い、身体へのダメージの大きい歩き方となってしまいます。
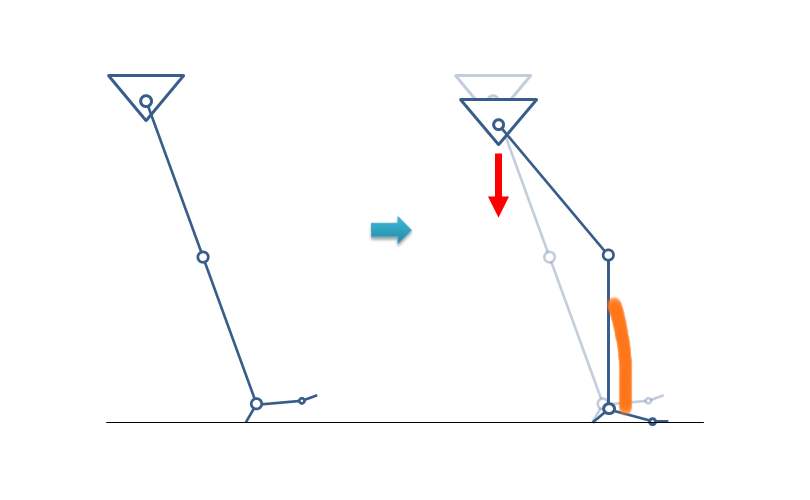
図4:膝折れ(膝くずれ)
大腿四頭筋が働かないと、膝折れ(膝くずれ)と呼ばれる異常現象が生じます(図4)。これは、踵が床に着いた直後、膝が急激に曲がって、身体が床へ落下していく現象です。つまり、大腿四頭筋は、膝が曲がっていかないように、脛骨に大腿骨をしっかり結び付けておく役割を担っています。
この膝折れが生じると、膝から上の身体を前進させることができなくなり、歩行不能となってしまいます。
ちなみに、大腿四頭筋が働かなくても、他の筋肉(大殿筋、大内転筋、ヒラメ筋など)の力を利用して無理やり膝を伸ばしながら歩ける場合があります。しかし、この歩き方を続けていると、膝が反対の方へ曲がっていくようになります。この膝は、反張膝と呼ばれています。この歩き方は、身体にとってダメージの大きな歩き方です。
アンクルロッカーについて説明していきます。(^^)/
推進力の生成④【歩行の基本⑥】
2.アンクルロッカー
前回説明したヒールロッカーは、踵が床に着くことで始まり、中足骨頭が床に着くことで終わります。
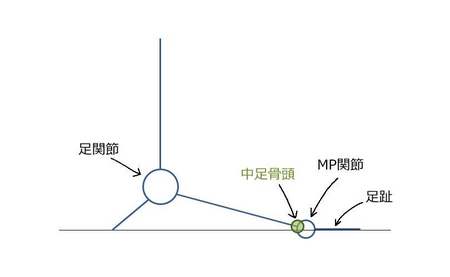
図1:中足骨頭
中足骨頭とは、足趾(足の指)の手前の骨である中足骨の足趾側の部分です(図1)。中足骨と足趾を繋げる関節はMP関節(metatarsophalangeal joint:中足趾節関節)とよばれ、中足骨頭はMP関節を構成しているものの一つです。
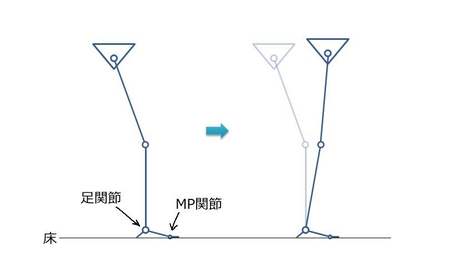
図2:アンクルロッカー
中足骨頭が床に着きヒールロッカーが終わると、次は、足関節を支点として、脚が前方へ回転していきます。これを、アンクルロッカー(足関節ロッカー)といいます(図2)。
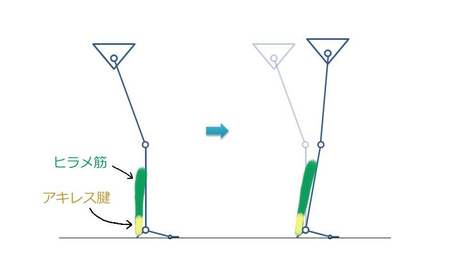
図3:ヒラメ筋とアキレス腱
このとき、ヒラメ筋という筋肉が重要な働きをしています(図3)。
ヒラメ筋は、脛骨と踵を結ぶ筋肉です。ヒラメ筋の踵へ付着する腱は、ご存知の方も多いアキレス腱です(図3)。
アンクルロッカーが生じているとき、ヒラメ筋は、絶妙な活動で、脛骨の前方への回転スピードをコントロールし、効率よく身体を前進させています。
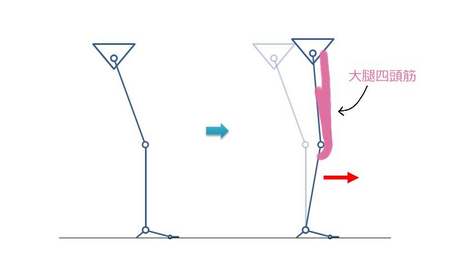
図4:ヒラメ筋が働かない場合のアンクルロッカー
しかし、ヒラメ筋が働かないと、脛骨の回転スピードが速くなり、大腿骨がそのスピードについていけなくなってしまいます。すると、膝が曲がってしまいます。そして、それ以上その膝が曲がっていかないよう、大腿四頭筋が活動を増大させます(図4)。
つまり、ヒラメ筋が働かないと、適切なアンクルロッカーを行えなくなり、エネルギー消費の大きい、効率の悪い歩き方となってしまいます。
次回は、フォアフットロッカーについて説明していきます。(^^)/
前回説明したヒールロッカーは、踵が床に着くことで始まり、中足骨頭が床に着くことで終わります。
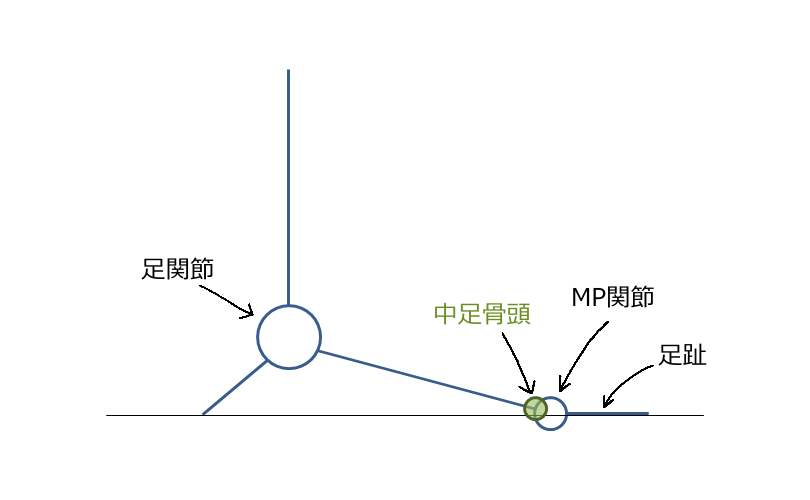
図1:中足骨頭
中足骨頭とは、足趾(足の指)の手前の骨である中足骨の足趾側の部分です(図1)。中足骨と足趾を繋げる関節はMP関節(metatarsophalangeal joint:中足趾節関節)とよばれ、中足骨頭はMP関節を構成しているものの一つです。
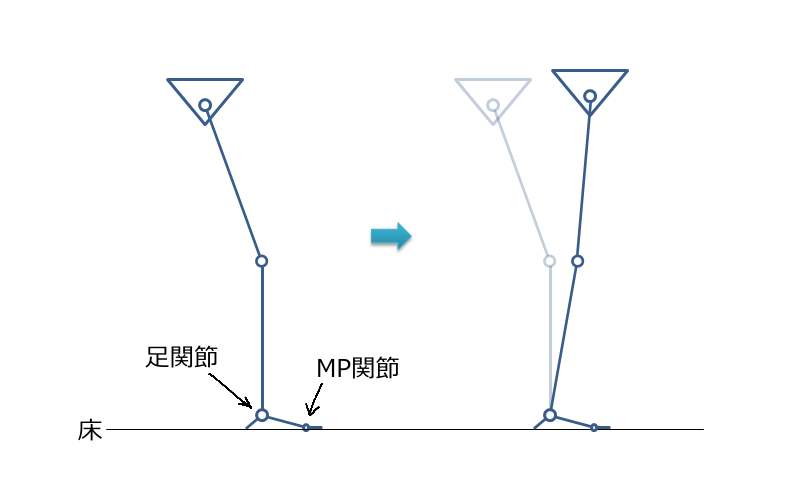
図2:アンクルロッカー
中足骨頭が床に着きヒールロッカーが終わると、次は、足関節を支点として、脚が前方へ回転していきます。これを、アンクルロッカー(足関節ロッカー)といいます(図2)。
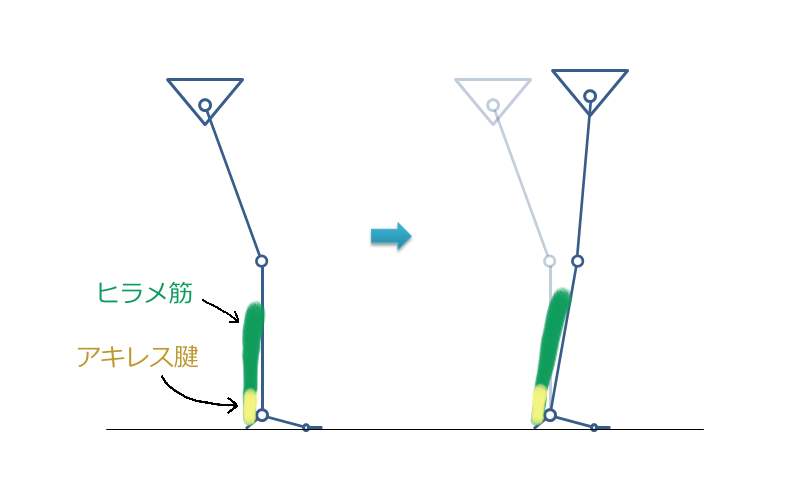
図3:ヒラメ筋とアキレス腱
このとき、ヒラメ筋という筋肉が重要な働きをしています(図3)。
ヒラメ筋は、脛骨と踵を結ぶ筋肉です。ヒラメ筋の踵へ付着する腱は、ご存知の方も多いアキレス腱です(図3)。
アンクルロッカーが生じているとき、ヒラメ筋は、絶妙な活動で、脛骨の前方への回転スピードをコントロールし、効率よく身体を前進させています。

図4:ヒラメ筋が働かない場合のアンクルロッカー
しかし、ヒラメ筋が働かないと、脛骨の回転スピードが速くなり、大腿骨がそのスピードについていけなくなってしまいます。すると、膝が曲がってしまいます。そして、それ以上その膝が曲がっていかないよう、大腿四頭筋が活動を増大させます(図4)。
つまり、ヒラメ筋が働かないと、適切なアンクルロッカーを行えなくなり、エネルギー消費の大きい、効率の悪い歩き方となってしまいます。
次回は、フォアフットロッカーについて説明していきます。(^^)/
推進力の生成⑤【歩行の基本⑦】
3.フォアフットロッカー①
前回説明したアンクルロッカーが生じている間、体重ベクトルは踵から前方に移動していきます。
体重ベクトルとは、重力、筋力、慣性力を合わせたものです。
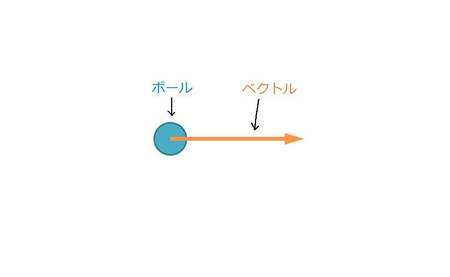
図1:ベクトル
ベクトルとは、大きさと向きを持った量です。ベクトルは、よく矢印で表されます。例えば、ある青いボールに力が加わっているとします。この力のベクトルを矢印で表すと図1のようになります。この図で、矢印の長さは力の大きさを、矢印の向きは力の向きを表しています。
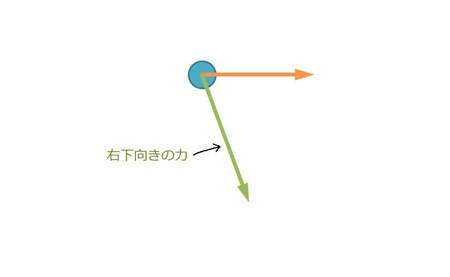
図2:2つのベクトル
図1の右向きの力が加わっているボールに、右下向きの力を加えるとどうなるでしょうか?(図2)
多くの人は、ボールはそれら矢印の間へ進んで行くだろう、その方向へ力がかかることになるだろうと予測すると思います。しかし、その力の大きさや向きは、正確には分からないと思います。
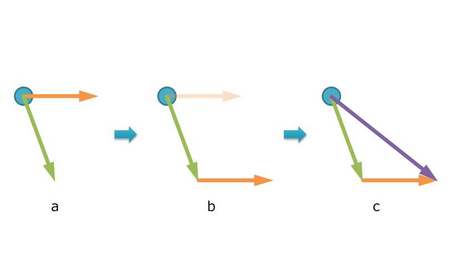
図3:ベクトルの合成
しかし、ベクトルを利用すると、それが簡単に分かります。どのようにすれば良いかというと、ベクトルの矢印を平行移動して、他のベクトルにつなげれば良いのです(図3)。
まず、図3bのように、オレンジの矢印を平行移動して、その始点を、緑の矢印の終点につなげます。次に図3cのように、緑の矢印の始点と、オレンジの矢印の終点を、新たな紫の矢印でつなげます。この紫の矢印、つまりこの新たなベクトルが、ボールにかかる力の大きさと向きを表すことになります。このように、2つ以上のベクトルをつないで新たな状態を表すことを、ベクトルの合成といいます。
つまり、体重ベクトルは、重力のベクトル、筋力のベクトル、慣性力のベクトルを合成したものです。
慣性力とは、物体がその運動状態を維持しようとする力です。物体にはそのような性質があります。止まっている物はずっと止まっていようとしますし、動いている物はずっと同じ状態で動いていようとします。
私たちが歩いているとき、身体は前へ進んでいますが、身体には前へ進むことを維持する力が生じています。この力が、歩いているときの慣性力です。
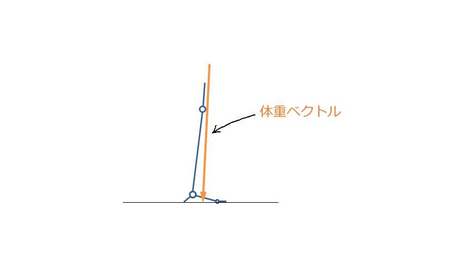
図4:体重ベクトル
体重ベクトルは、歩行中片脚立ちになっているとき、常に足底(足の裏)のどこかに向かっています(図4)。つまり、そのときの体重ベクトルは、足で床を押している力ともいえます。またそれは、床に対して、真っ直ぐだったり、斜めだったりします。
前回説明したアンクルロッカーが生じている間、体重ベクトルは踵から前方に移動していきます。
体重ベクトルとは、重力、筋力、慣性力を合わせたものです。
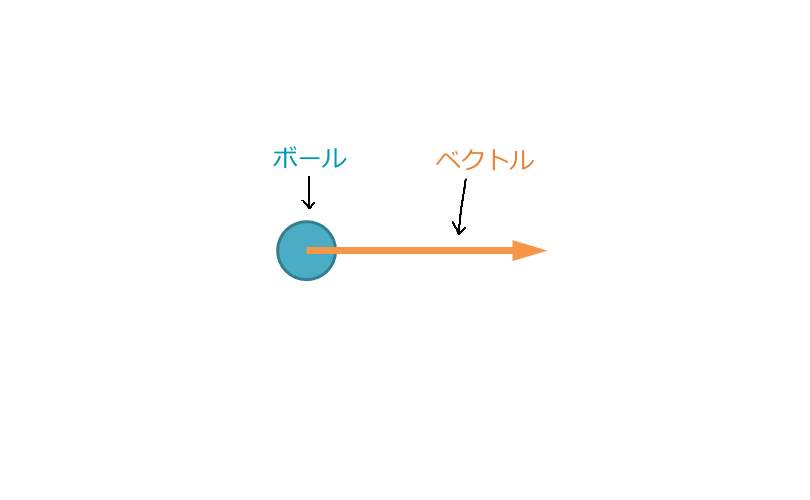
図1:ベクトル
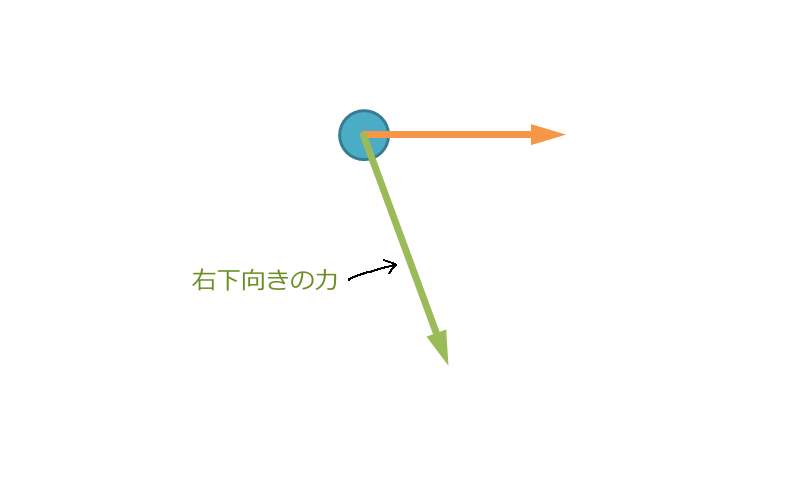
図2:2つのベクトル
図1の右向きの力が加わっているボールに、右下向きの力を加えるとどうなるでしょうか?(図2)
多くの人は、ボールはそれら矢印の間へ進んで行くだろう、その方向へ力がかかることになるだろうと予測すると思います。しかし、その力の大きさや向きは、正確には分からないと思います。
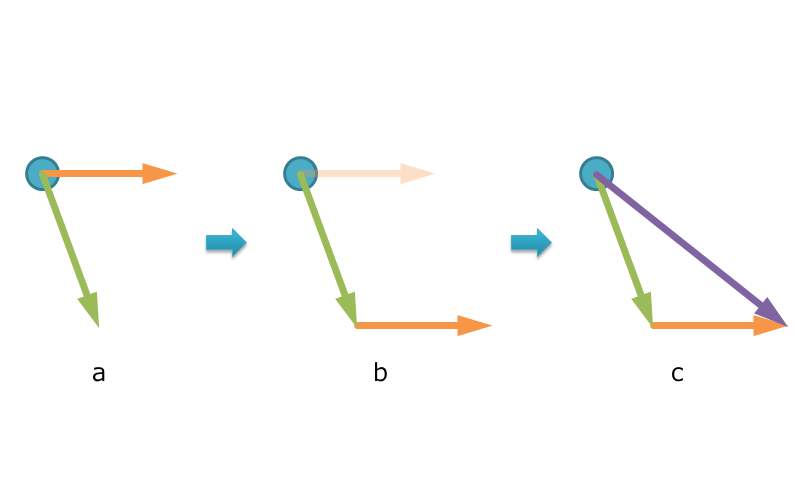
図3:ベクトルの合成
しかし、ベクトルを利用すると、それが簡単に分かります。どのようにすれば良いかというと、ベクトルの矢印を平行移動して、他のベクトルにつなげれば良いのです(図3)。
まず、図3bのように、オレンジの矢印を平行移動して、その始点を、緑の矢印の終点につなげます。次に図3cのように、緑の矢印の始点と、オレンジの矢印の終点を、新たな紫の矢印でつなげます。この紫の矢印、つまりこの新たなベクトルが、ボールにかかる力の大きさと向きを表すことになります。このように、2つ以上のベクトルをつないで新たな状態を表すことを、ベクトルの合成といいます。
つまり、体重ベクトルは、重力のベクトル、筋力のベクトル、慣性力のベクトルを合成したものです。
慣性力とは、物体がその運動状態を維持しようとする力です。物体にはそのような性質があります。止まっている物はずっと止まっていようとしますし、動いている物はずっと同じ状態で動いていようとします。
私たちが歩いているとき、身体は前へ進んでいますが、身体には前へ進むことを維持する力が生じています。この力が、歩いているときの慣性力です。
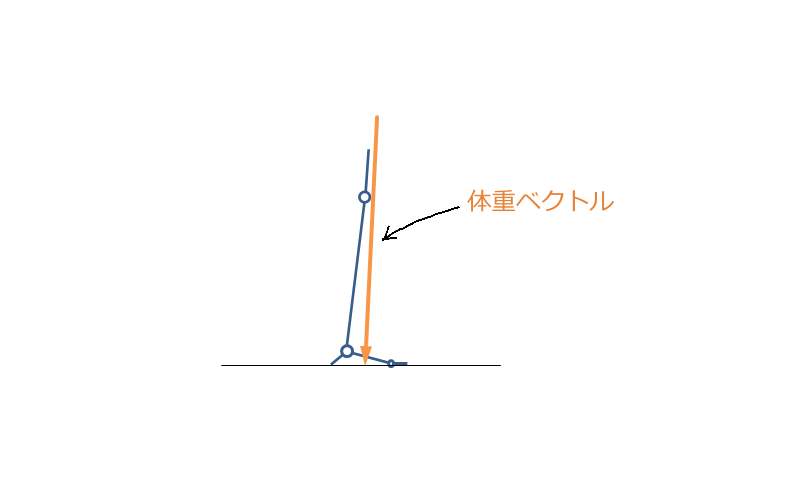
図4:体重ベクトル
体重ベクトルは、歩行中片脚立ちになっているとき、常に足底(足の裏)のどこかに向かっています(図4)。つまり、そのときの体重ベクトルは、足で床を押している力ともいえます。またそれは、床に対して、真っ直ぐだったり、斜めだったりします。
推進力の生成⑥【歩行の基本⑧】
3.フォアフットロッカー②
前々回説明したアンクロッカーは、中足骨頭が床に着くことで始まり、踵が持ち上がることで終わります。
前回説明した体重ベクトルは、アンクルロッカーが生じているとき、踵から前方へ移動してきます。
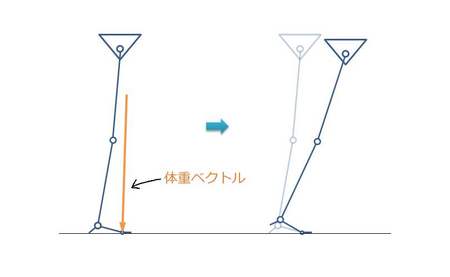
図1:フォアフットロッカー
そして、体重ベクトルが中足骨頭に達すると、踵が持ち上がっていきます。つまり、中足骨頭を支点として、脚が前方へ回転していきます。これを、フォアフットロッカー(前足部ロッカー)といい、アンクルロッカーに続いて生じます(図1)。
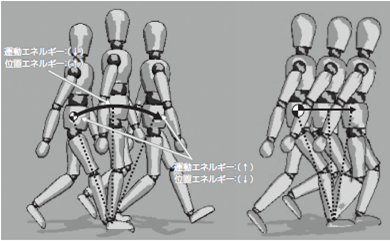
フォアフットロッカーで踵が持ち上がり始めると、身体は前方へ落下し始めます。このとき、身体の前進は加速されます。この加速は、歩行の中で、最も大きな推進力となります。またこのとき、重心は最も高い位置にあります。
この推進力は、重力による身体の落下(位置エネルギー)と、前方に振り出されている反対側の脚の運動量(運動エネルギー)によるものです。
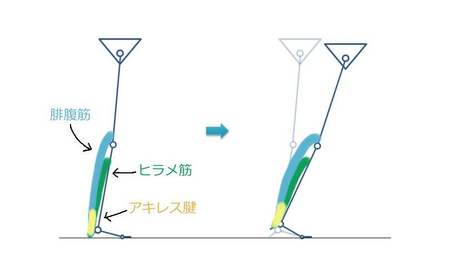
図2:ヒラメ筋と腓腹筋
フォアフットロッカーでは、ヒラメ筋と腓腹筋という筋肉が重要な働きをします(図2)。
腓腹筋は、大腿骨と踵を結ぶ筋肉です。
フォアフットロッカーが生じているとき、ヒラメ筋と腓腹筋は、足関節を固定する役目を果たしています。
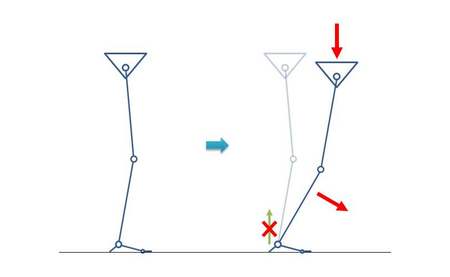
図3:ヒラメ筋と腓腹筋が働かない場合のフォアフットロッカー
ヒラメ筋と腓腹筋が働かないと、足関節が過度に背屈してしまいます(反ってしまいます)。そうなると、適切に踵が持ち上がらなくなり、フォアフットロッカーの利点が失われてしまいます(図3)。
また、重心も低くなってしまい、様々な悪影響が出てしまう歩き方となってしまいます。
前々回説明したアンクロッカーは、中足骨頭が床に着くことで始まり、踵が持ち上がることで終わります。
前回説明した体重ベクトルは、アンクルロッカーが生じているとき、踵から前方へ移動してきます。
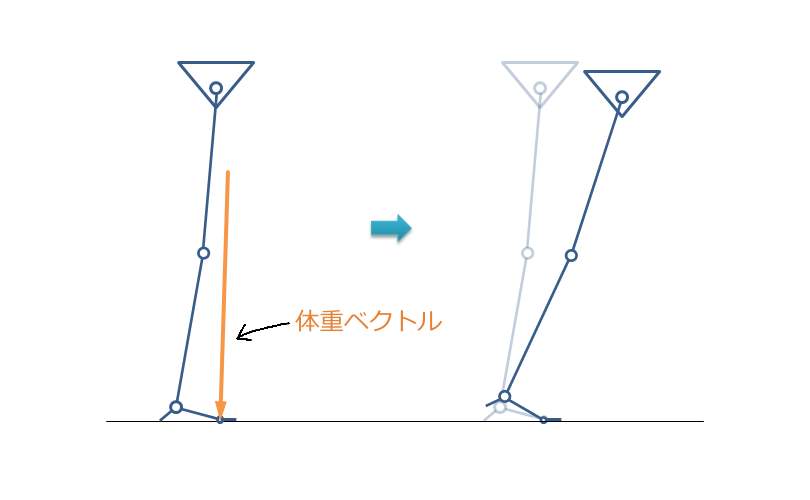
図1:フォアフットロッカー
そして、体重ベクトルが中足骨頭に達すると、踵が持ち上がっていきます。つまり、中足骨頭を支点として、脚が前方へ回転していきます。これを、フォアフットロッカー(前足部ロッカー)といい、アンクルロッカーに続いて生じます(図1)。
フォアフットロッカーで踵が持ち上がり始めると、身体は前方へ落下し始めます。このとき、身体の前進は加速されます。この加速は、歩行の中で、最も大きな推進力となります。またこのとき、重心は最も高い位置にあります。
この推進力は、重力による身体の落下(位置エネルギー)と、前方に振り出されている反対側の脚の運動量(運動エネルギー)によるものです。
図2:ヒラメ筋と腓腹筋
フォアフットロッカーでは、ヒラメ筋と腓腹筋という筋肉が重要な働きをします(図2)。
腓腹筋は、大腿骨と踵を結ぶ筋肉です。
フォアフットロッカーが生じているとき、ヒラメ筋と腓腹筋は、足関節を固定する役目を果たしています。
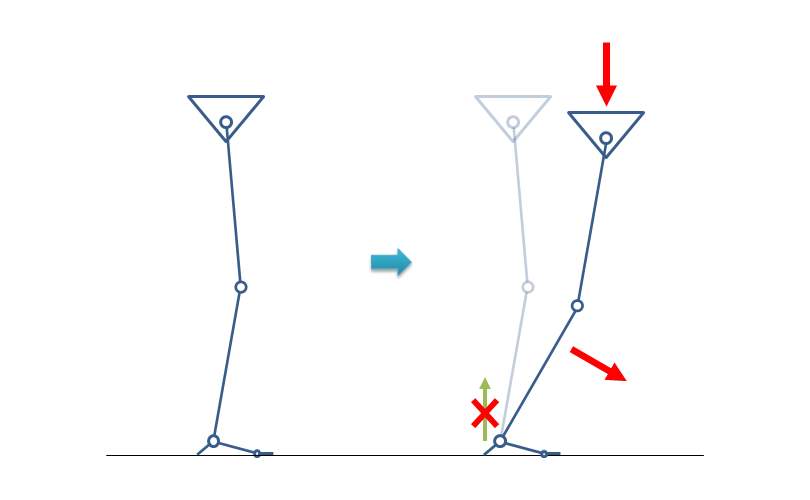
図3:ヒラメ筋と腓腹筋が働かない場合のフォアフットロッカー
※ヒラメ筋と腓腹筋が働かない場合、アンクルロッカーも適切に行われなくなる。
そのため、フォアフットロッカー開始時の脚の姿勢は通常とは異なる。
そのため、フォアフットロッカー開始時の脚の姿勢は通常とは異なる。
ヒラメ筋と腓腹筋が働かないと、足関節が過度に背屈してしまいます(反ってしまいます)。そうなると、適切に踵が持ち上がらなくなり、フォアフットロッカーの利点が失われてしまいます(図3)。
また、重心も低くなってしまい、様々な悪影響が出てしまう歩き方となってしまいます。
推進力の生成⑦【歩行の基本⑨】
3.フォアフットロッカー③
前回説明したフォアフットロッカーが生じている期間は、踵が持ち上がってから、反対側の足が床に着くまでです。
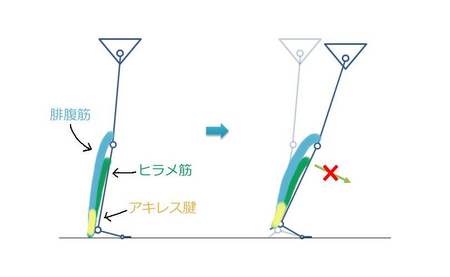
図1:フォアフットロッカーでのヒラメ筋と腓腹筋の働き
このフォアフットロッカーが生じているとき、足関節は背屈角度を大きくしていきます(反っていきます)。
また、このとき、脛骨の前進は、加速するどころか減速していきます。
その中で反対側の足が床に着くのです。
つまり、このときのヒラメ筋と腓腹筋の活動は、推進力として働くのではなく、身体が前進しようとする慣性力を抑制するために働いているのです(図1)。
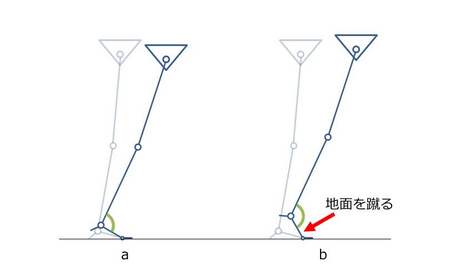
図2:実際の自然歩行と地面を蹴るときの足関節
※a:実際の自然歩行の姿勢。足関節はやや背屈する(足首が反る)。b:地面を蹴る場合の姿勢。足関節は底屈する(足首を倒す)。自然歩行ではこの動きは生じない。
このフォアフットロッカーが生じている期間に対して、よくプッシュオフ(push off:踏み切り、蹴り出し)という用語が用いられます。
このプッシュオフという言葉からは、「地面を蹴って前へ進む」というニュアンスを感じ取ってしまうと思います。
しかし、先ほど説明したように、自然歩行(普段の歩行、自然に楽に歩いている状態)でのこの期間では、「地面を蹴る」ようなことはしていません(図2a)。
「地面を蹴る」には、足関節を底屈させなければ(倒さなければ)いけません(図2b)。しかし、そのようなことは生じておらず、むしろ逆に背屈していきます(図2a)。
多くの人が、このプッシュオフという用語によって、実際の正しい歩き方のしくみを誤解してしまっているように感じます。。。(>_<)
次回は、トウロッカーについて説明していきます。(^^)/
前回説明したフォアフットロッカーが生じている期間は、踵が持ち上がってから、反対側の足が床に着くまでです。
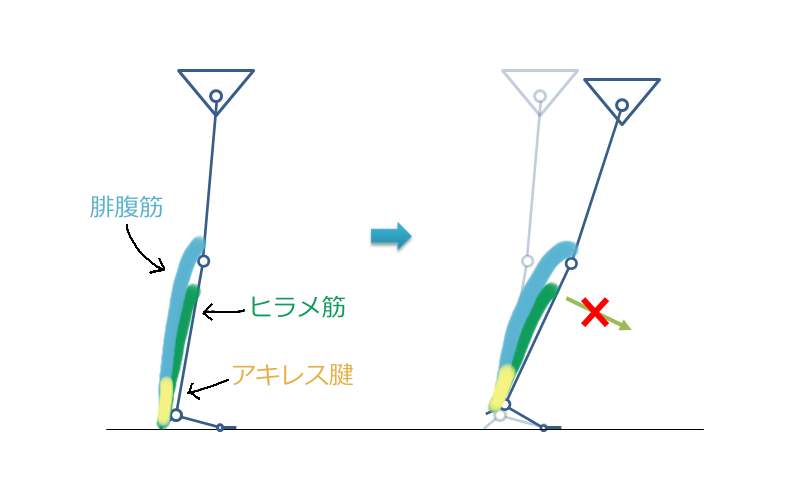
図1:フォアフットロッカーでのヒラメ筋と腓腹筋の働き
このフォアフットロッカーが生じているとき、足関節は背屈角度を大きくしていきます(反っていきます)。
また、このとき、脛骨の前進は、加速するどころか減速していきます。
その中で反対側の足が床に着くのです。
つまり、このときのヒラメ筋と腓腹筋の活動は、推進力として働くのではなく、身体が前進しようとする慣性力を抑制するために働いているのです(図1)。
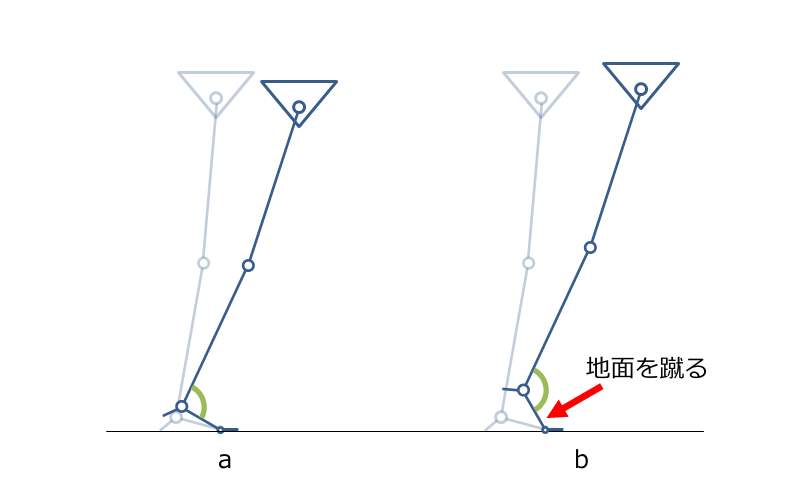
図2:実際の自然歩行と地面を蹴るときの足関節
※a:実際の自然歩行の姿勢。足関節はやや背屈する(足首が反る)。b:地面を蹴る場合の姿勢。足関節は底屈する(足首を倒す)。自然歩行ではこの動きは生じない。
このフォアフットロッカーが生じている期間に対して、よくプッシュオフ(push off:踏み切り、蹴り出し)という用語が用いられます。
このプッシュオフという言葉からは、「地面を蹴って前へ進む」というニュアンスを感じ取ってしまうと思います。
しかし、先ほど説明したように、自然歩行(普段の歩行、自然に楽に歩いている状態)でのこの期間では、「地面を蹴る」ようなことはしていません(図2a)。
「地面を蹴る」には、足関節を底屈させなければ(倒さなければ)いけません(図2b)。しかし、そのようなことは生じておらず、むしろ逆に背屈していきます(図2a)。
多くの人が、このプッシュオフという用語によって、実際の正しい歩き方のしくみを誤解してしまっているように感じます。。。(>_<)
次回は、トウロッカーについて説明していきます。(^^)/
推進力の生成⑧【歩行の基本⑩】
4.トウロッカー
前回まで説明していたフォアフットロッカーは、踵が持ち上がることで始まり、反対側の足が床に着くことで終わります。
反対側の足が床に着いたからといって、すぐにフォアフットロッカーが生じていた足が床から離れるわけではありません。しばらくは、中足骨頭から足趾にかけて、床に着いたままの状態が続きます。その後、中足骨頭が持ち上がり、足趾、最終的に母趾(親指)が床から離れていきます。
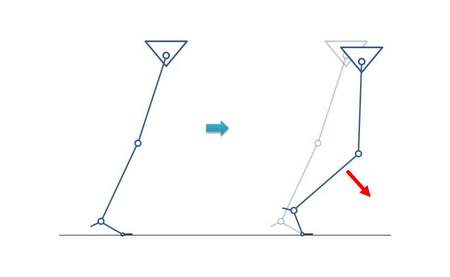
図1:トウロッカー
この間、中足骨頭や足趾を支点にして、脛骨が前方へ回転していきます。これをトウロッカー(足趾ロッカー)といいます(図1)。このとき、足関節は底屈していき、膝関節は屈曲していきます(曲がっていきます)。
このトウロッカーで重要なことは、脛骨を前進させることです。脛骨を前進させ、推進力を生むことです。
このとき、脛骨を前進させるためには、足関節を底屈させなければなりません(足首を倒す)。
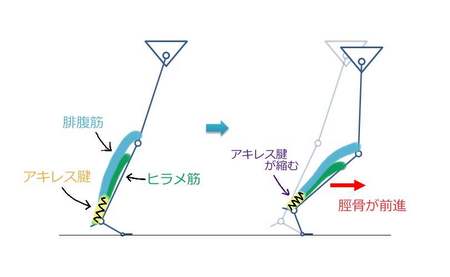
図2:アキレス腱による底屈
実は、この足関節を底屈させる力の源は、なんと、筋肉ではなく、主にアキレス腱なのです!(図2)
反対側の足が床に着くと、フォアフットロッカーが生じていた脚にかかっている力(体重など)が、急速に小さくなっていきます。このため、足関節をしっかり固定する必要がなくなり、ヒラメ筋や腓腹筋は、急速に力を弱めます。
一方、フォアフットロッカーが終わるまで、アキレス腱は、ヒラメ筋と腓腹筋の力によって引き伸ばされています。そして、反対側の足が床に着くことにより、脚にかかっている力が急速に小さくなり、また、ヒラメ筋と腓腹筋の力が弱くなると、引き伸ばされていたアキレス腱は元の長さに戻ろうと縮まります。
このアキレス腱の縮まる力で、足関節は底屈していくのです!そして、脛骨は前進していきます。
このように、アキレス腱は、バネのような働きをしているのです。
整理すると次のようになります。
①アキレス腱が、ヒラメ筋と腓腹筋の力によって引き伸ばされる
②反対側の足が床に着く
③脚にかかっている力や、ヒラメ筋と腓腹筋の筋肉の力が小さくなる
④引き伸ばされていたアキレス腱が、元の長さに戻ろうとして縮まる
⑤足関節が底屈する
⑥脛骨が前進する
前回、プッシュオフ(push off:踏み切り、蹴り出し)という用語を紹介しました。このプッシュオフという用語は、このトウロッカーのときに用いられる方が適切だと思われます。
ただ、トウロッカーでのプッシュオフは、身体を前進させるものではなく、脚を前進させるものです。
以上のように、トウロッカーは、反対側の足が床に着くことで始まり、足趾が床から離れることで終わります。
今回で正しい歩き方を理解するために必要な、4つのロッカー機構の説明は終わりになります。次回は、推進力の生成についてまとめます。(^^)/
前回まで説明していたフォアフットロッカーは、踵が持ち上がることで始まり、反対側の足が床に着くことで終わります。
反対側の足が床に着いたからといって、すぐにフォアフットロッカーが生じていた足が床から離れるわけではありません。しばらくは、中足骨頭から足趾にかけて、床に着いたままの状態が続きます。その後、中足骨頭が持ち上がり、足趾、最終的に母趾(親指)が床から離れていきます。

図1:トウロッカー
この間、中足骨頭や足趾を支点にして、脛骨が前方へ回転していきます。これをトウロッカー(足趾ロッカー)といいます(図1)。このとき、足関節は底屈していき、膝関節は屈曲していきます(曲がっていきます)。
このトウロッカーで重要なことは、脛骨を前進させることです。脛骨を前進させ、推進力を生むことです。
このとき、脛骨を前進させるためには、足関節を底屈させなければなりません(足首を倒す)。
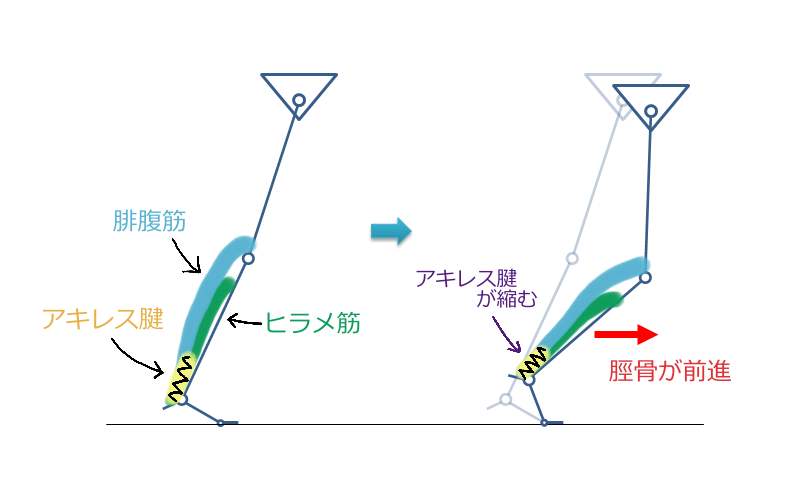
図2:アキレス腱による底屈
実は、この足関節を底屈させる力の源は、なんと、筋肉ではなく、主にアキレス腱なのです!(図2)
反対側の足が床に着くと、フォアフットロッカーが生じていた脚にかかっている力(体重など)が、急速に小さくなっていきます。このため、足関節をしっかり固定する必要がなくなり、ヒラメ筋や腓腹筋は、急速に力を弱めます。
一方、フォアフットロッカーが終わるまで、アキレス腱は、ヒラメ筋と腓腹筋の力によって引き伸ばされています。そして、反対側の足が床に着くことにより、脚にかかっている力が急速に小さくなり、また、ヒラメ筋と腓腹筋の力が弱くなると、引き伸ばされていたアキレス腱は元の長さに戻ろうと縮まります。
このアキレス腱の縮まる力で、足関節は底屈していくのです!そして、脛骨は前進していきます。
このように、アキレス腱は、バネのような働きをしているのです。
整理すると次のようになります。
①アキレス腱が、ヒラメ筋と腓腹筋の力によって引き伸ばされる
②反対側の足が床に着く
③脚にかかっている力や、ヒラメ筋と腓腹筋の筋肉の力が小さくなる
④引き伸ばされていたアキレス腱が、元の長さに戻ろうとして縮まる
⑤足関節が底屈する
⑥脛骨が前進する
前回、プッシュオフ(push off:踏み切り、蹴り出し)という用語を紹介しました。このプッシュオフという用語は、このトウロッカーのときに用いられる方が適切だと思われます。
ただ、トウロッカーでのプッシュオフは、身体を前進させるものではなく、脚を前進させるものです。
以上のように、トウロッカーは、反対側の足が床に着くことで始まり、足趾が床から離れることで終わります。
今回で正しい歩き方を理解するために必要な、4つのロッカー機構の説明は終わりになります。次回は、推進力の生成についてまとめます。(^^)/
推進力の生成⑨【歩行の基本⑪】
◎推進力の生成のまとめ
前回まで、推進力の生成について説明してきました。今回はそのまとめをしたいと思います。(^^)/
私たちが歩くときの推進力は、主に次の2つで作られます。
①重力による身体の前方への落下
②振り出される脚の前方へ進もうとする力
特に①が主要な推進力となります。
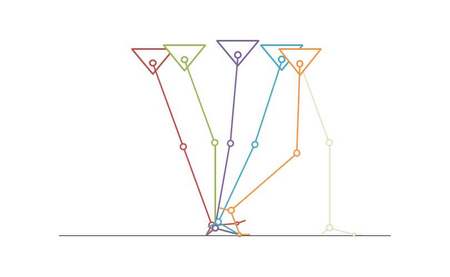
図1:立脚側下肢のロッカー機構
①での推進力を生成、維持するために、ロッカー機構という仕掛けを利用しています(図1)。
ロッカー機構には、段階的に次の4つのものがあります。
1.ヒールロッカー(踵ロッカー)⇒図1:赤~緑
2.アンクルロッカー(足関節ロッカー)⇒図1:緑~紫
3.フォアフットロッカー(前足部ロッカー)⇒図1:紫~青
4.トウロッカー(足趾ロッカー)⇒図1:青~橙
また、②での推進力は、「4.トウロッカー」でのアキレス腱が縮もうとする力が基になっています。
ちなみに、②での推進力は、振り出す脚のスピードを速くすると、より大きくなります。その結果、歩くスピードが速くなります。
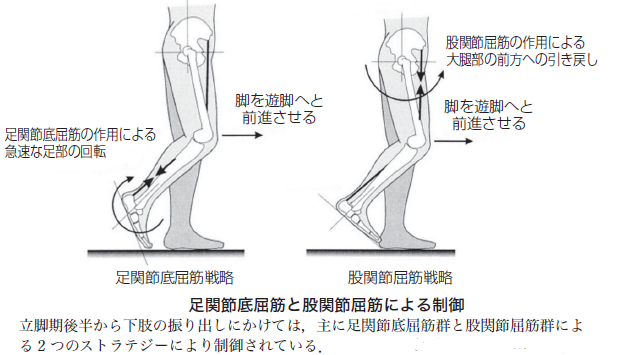
振り出す脚のスピードを速くするには、意識的に股関節を屈曲させたり(脚の付け根を素早く曲げる)、膝関節を伸展させたりします(膝を素早く伸ばす)。
以上のようにして、私たちは歩くための力を生み出しているのです。このことをしっかり理解して、正しい歩き方を身につけましょう。(^^)/
次回からは、衝撃の吸収について説明していきます。(^^)/
下腿の内反内旋を防止すれば反張膝を防ぐことができます
前回まで、推進力の生成について説明してきました。今回はそのまとめをしたいと思います。(^^)/
私たちが歩くときの推進力は、主に次の2つで作られます。
①重力による身体の前方への落下
②振り出される脚の前方へ進もうとする力
特に①が主要な推進力となります。
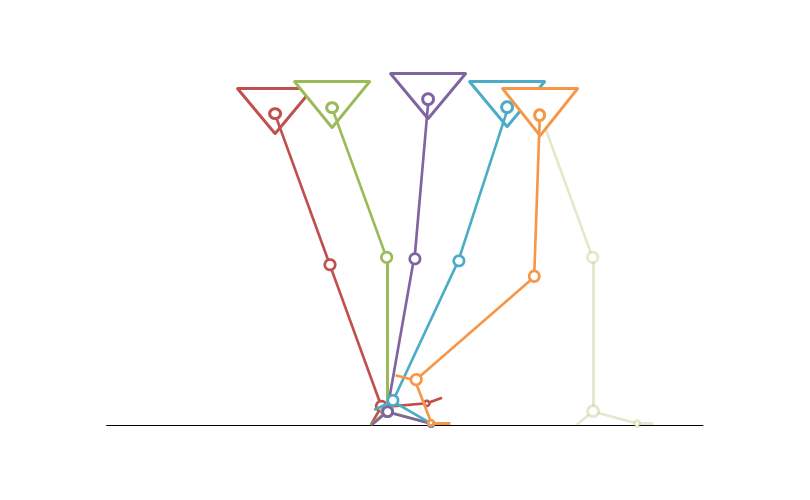
図1:立脚側下肢のロッカー機構
①での推進力を生成、維持するために、ロッカー機構という仕掛けを利用しています(図1)。
ロッカー機構には、段階的に次の4つのものがあります。
1.ヒールロッカー(踵ロッカー)⇒図1:赤~緑
2.アンクルロッカー(足関節ロッカー)⇒図1:緑~紫
3.フォアフットロッカー(前足部ロッカー)⇒図1:紫~青
4.トウロッカー(足趾ロッカー)⇒図1:青~橙
※トウロッカーの終わりは、反対側下肢のヒールロッカーの終わり(図1:半透明緑)にあたる
推進力が生成されるときは、「3.フォアフットロッカー」のときです。このとき、「①重力による身体の前方への落下」(立脚側下肢)、「②振り出される脚の前方へ進もうとする力」(遊脚側下肢)が生じます。また、②での推進力は、「4.トウロッカー」でのアキレス腱が縮もうとする力が基になっています。
ちなみに、②での推進力は、振り出す脚のスピードを速くすると、より大きくなります。その結果、歩くスピードが速くなります。
振り出す脚のスピードを速くするには、意識的に股関節を屈曲させたり(脚の付け根を素早く曲げる)、膝関節を伸展させたりします(膝を素早く伸ばす)。
以上のようにして、私たちは歩くための力を生み出しているのです。このことをしっかり理解して、正しい歩き方を身につけましょう。(^^)/
次回からは、衝撃の吸収について説明していきます。(^^)/
下腿の内反内旋を防止すれば反張膝を防ぐことができます